手板不僅是可視的,而且是可觸摸的���,他可以很直觀的以實物的形式把設計師的創(chuàng)意反映出來,避免了“畫出來好看而做出來不好看” 的弊端�����。因此手板制作在新品開發(fā)���,產(chǎn)品外形推敲的過程中是必不可少的���。同樣��,做跟地機器人手板的目的是為了檢驗產(chǎn)品的設計是否合理���,加快新產(chǎn)品的研發(fā)。
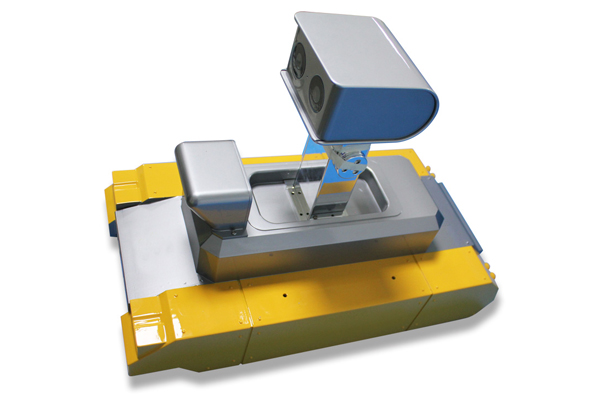
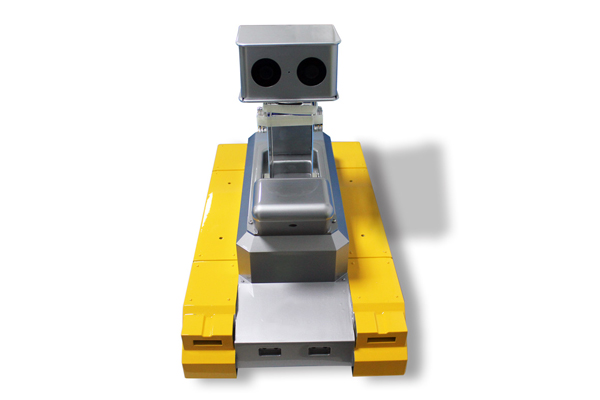
下圖是一個跟地機器人的結(jié)構(gòu)手板���,整個手板的材料是ABS�,主要分為上下兩部分��,上面是攝像頭��,下面是坦克��,當坦克移動的時候��,攝像頭拍攝的范圍也隨之移動��。它的加工方式是真空復模�����,主要包括以下這幾個步驟���。
一:用CNC�,SLA,或者泥雕加工出原型��,做水口�。
二:用板子將原型圍住,為做模具做準備����。
三:將用真空機抽好真空了的液體硅膠倒入模具內(nèi),將產(chǎn)品全部覆蓋住�。
四:將模具放入烤箱內(nèi)烘烤,以便硅膠模具加速固化成型���。
五:將原型從模具內(nèi)取出�����。
六:根據(jù)產(chǎn)品所需要的材料���,抽真空倒料復制出的一些成品�����。
深圳銳曼智是一家從事語音機器人手板制作的廠家,機器人“小曼”是他們公司自主研發(fā)的一款新的智能機器人��,為了能夠在展會上獲得好的效果��,他們從2月份就開始物色能夠做機器人的手板廠家���,經(jīng)過各方面對比后���,將目標鎖定在拓維模型上。
當這個機器人做好后����,我們發(fā)順豐快遞給銳曼智,總算在規(guī)定的時間內(nèi)讓他們順利地完成了參展�。在展會上,機器人“小曼”受到了習大大的檢閱�����,并且受到了高度贊揚����。